Emergency Path Planning
- Seulki Kim
- Mar 22, 2022
- 1 min read

Updated: Oct 14, 2022
Collaborative Research
Research Motivation
Urban Air Mobility (UAM) will operate at lower altitudes over metropolitan areas. Due to limited recovery abilities, emergency landing scenarios must be considered to understand the risks in some situations of flight failures. This work provides a pre-flight planning tool to assist these vehicles when emergency landing is required in crowded areas.
Key Idea
This research proposes the following approach for emergency path planning:
Data fusion from multiple sources, including population geographic data, lidar scan geometric data, and land cover semantic data from an aerial imagery
Risk-map generation by aggregating these data layers
Emergency path planning to explore safe paths by leveraging energy-aware Rapidly Exploring Random Tree (RRT)
Results
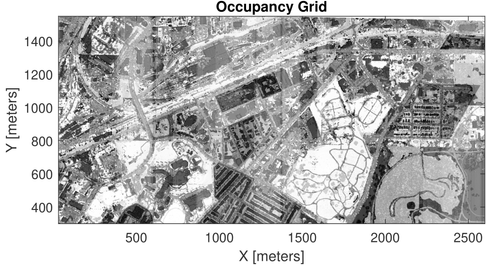
Washington D.C. area is chosen for demonstration of the proposed system. The following figures illustrate the combination process to generate a risk-map by aggregating diverse data layers and an example of the risk-map constructed in specific area of Washington D.C.


Based on the risk-map constructed, the following result shows paths planned by a well-known A* algorithm (brown) and the proposed energy-aware RRT (red), showing that the energy-aware RRT creates a safe path with relatively long travel time while A* provides non-safe path with a minimum travel time.

Publication


Comments